



017 | 在智能驾驶的开发中,为什么仿真的作用越来越重要?
Description
编者按:《郭继舜带你读汽车科技》旨在从第一性原理出发,尝试拨开迷雾,解读热点背后的汽车科技真相。
本栏目由智能驾驶专家郭继舜博士与汽车之心联合出品,内容独家授权汽车之心发布。
各位朋友,有挺长一段时间没有更新了,因为这段时间我一直专注于处理一款量产车型的智能驾驶功能问题。
这款车型很快就要量产了,但是智能驾驶功能还有比较大的优化空间,至少还没有到让我们满意。
其实每当到了某个车型智能驾驶配置即将量产的前夕,都是最忙碌的时候,大量的道路测试会反馈回无数多的问题,每天都在不断解决算法 bug 和反复调试系统参数。
因为每款车型我都希望能搭载一些新研发的功能,这些技术的亮点在研发过程中也会是最难做好的问题,所以智能驾驶汽车的研发很像是西西弗斯,每个车型就是一块巨石,痛苦和成就感交替,周而复始。
而最近这款车型,是我从事智能驾驶量产这些年中,最狼狈的一次,因为想上尽可能多的新功能,所以见到了人生里最长的问题列表。
终于,到今晚为止,关闭了 94% 的遗留问题,功能和性能表现达到了不错的水平,赶快来录音频把这几天欠的债补上。
首先,我要把这几天调试的一部分心得给大家做一个梳理,以下主要针对智能驾驶量产的整车系统表现,不包括 L4 及以上智能驾驶:
1. 多传感器融合是非常不好做的,特别是在速度比较高的场景下,更是需要耐心的调教和测试;
2. 我记得 2018 年的 CVPR,在一个智能驾驶的 Workshop 中讨论过一个话题:现阶段什么技术是自动驾驶算法中最难的技术?众多业内大佬经过热烈探讨,结论是感知依然是当前自动驾驶最难做好的技术。
我当时有点不以为然,一群做深度学习和计算机视觉的专家,肯定说自己做的这部分技术含量最高。
经过这几天的历练,我越来越深刻地感受到,感知确实是现阶段最难解决的问题,感知不准确,我们在决策端做再多的算法补偿的效果都是有限的;
3. 行车场景下的各种大货车、模糊不清的车道线、新旧车道线交叠的场景,是最容易影响智能驾驶表现的场景.
泊车场景下,用不同颜色砖块表示泊车线的泊车位、地下停车场柱子旁边的泊车位,这些场景很考验融合泊车系统的鲁棒性;
4. 选择好的执行器件非常重要,特别是 EPS,死区过大往往会让你和工程师们有抱头痛哭的冲动;
5. 智能驾驶开发,仿真平台的作用愈发关键了,实车测试遇到典型场景的密度太低,造成测试效率数量级上的落后。
现阶段,我们在 L4 自动驾驶研发中使用了相对多比例的仿真测试,但因为量产的 ADAS 车型需要兼顾运动学和动力学的系统性能仿真,所以现阶段还不能把各种段整合得足够好。
量产层面,我们还是比较依赖实车的测试验证的。
但大趋势是,整车厂越来越需要智能驾驶仿真了。
其实我们很早就开始尝试使用侠盗猎车手 5、百度 Apollo 平台等来做智能驾驶算法的仿真。
量产上也会使用台架、车辆在环系统进行一部分的仿真工作,但真正让我有深刻触动的,是有一次针对一款旗舰车型的实验样车审批。
因为近年来智能驾驶、车联网功能量产搭载的比例非常大,样车需求也急剧增加,加上智能驾驶的很多功能在量产前的功能验证,动辄数万公里的验证里程,让智能驾驶成为了实验样车需求的大户。
举个例子,去年某款新能源汽车的 AEB 一个功能,我们就验证了 5 万公里。
最终这款旗舰车型的样车需求统计下来,数字惊人,加上实验样车因为量少,零部件成本非常昂贵,样车总计的成本几乎上亿。
所以大家以后在路上看到有伪装的实验样车,可别笑他们破破烂烂,每台车买一两台保时捷 718 是绰绰有余的。
前面讲到仿真的重要性,今天我们就来谈谈自动驾驶的仿真技术。
首先,简单总结自动驾驶为什么需要虚拟仿真技术:
1. 虚拟仿真能够以非常快的遍历速度和极高的场景密度让自动驾驶系统在更多场景下对算法逻辑和功能进行验证,其算法逻辑验证的效率是实车测试的数百、上千倍;
2. 虚拟仿真能够还原极少出现但理论上还是会遇到的 Conner case,甚至是车祸场景,在实际路上故意创造这样的场景的成本很高,也有危险性;
3. 虚拟仿真能够对所有交通参与者的行为进行定量的设定和改变,这样就能够创造出更多的场景,轻松验证场景的覆盖度;
4. 在未来使用量产车型众包的方式来收集场景的过程中,我们需要使用虚拟仿真还原众包数据的结果;
5. 全都用实车测试太贵,算法改进效率也很低;
6. 其实 MPI(Miles Per Intervention),也就是脱离里程,是非常不科学的评测自动驾驶系统能力的手段。
后续我们可以通过收集足够多的场景,使用虚拟仿真系统,快速客观地通过测试不同自动驾驶系统的场景覆盖度来评估优劣。
1、什么是自动驾驶虚拟仿真技术?
实际上仿真技术从计算机诞生之初就已广泛应用在现代工业化大生产的体系中了,从计算机辅助设计(CAD)、计算机辅助工程分析(CAE)到计算机辅助生产制造(CAM),虚拟仿真技术在其中都起到了非常重要的作用。
仅以汽车行业为例,我们常见的就有空气流体力学仿真、车体碰撞仿真、发动机燃烧过程仿真、车身 NVH 声学仿真、车辆动力学仿真以及车辆控制算法仿真等等。
这些仿真技术的类型与应用各不相同,但是其核心原理仍然是计算机建模与应用,大致的过程可以抽象为以下几个步骤(如下图所示):
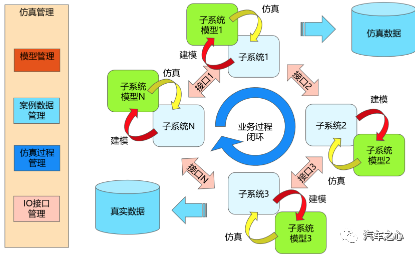
1)分解过程:根据业务过程闭环,将应用系统划分成为接口明确的子系统。具体到智能驾驶,就是把智能驾驶的各个功能和软硬件模块划分出来。
<p style="color:#333333;fo




 United States
United States
